안녕하세요. 슬기로운 아봉생활에 방문해주신 구독자님!

오늘 아봉이가 들고온 주제는 "DMU KINEMATICS"입니다.
그럼 포스팅 진행해 보도록 하겠습니다!
서론
PART DESIGN이나 GENERATIVE SHAPE DESIGN을 사용하여 원하는 부품을 모델링 하고
이것들을 ASSEMBLY DESIGN으로 조립을 한 뒤에
실제로 조립된 제품이 구동이 잘 되는지 카티아로 확인이 가능한데요.
그것을 가능케하는 모듈이 DMU KINEMATICS 입니다.
오늘 그 모듈을 간단히 맛보려 하는데요.
포스팅 시작하도록 하겠습니다!
ASSEMBLY DESIGN 준비
DMU KINEMATICS 모듈에서 구속을 주기 전에 우선 ASSEMBLY DESIGN에서 위치 구속을 해줍니다.
볼트와 너트를 모델링하여 준비했어요.
① 첫번째로 볼트를 고정시키려 fix를 해주고
② 볼트 축과 너트 축을 일치 구속 해줍니다.
③ 그리고나서 볼트의 나사부 끝과 그 곳에 가까운 너트의 면 간 거리를 37mm로 셋팅해줍니다.
DMU KINEMATICS 모듈
ASSEMBLY DESIGN 작업을 마무리한 뒤에 DMU KINEMATICS 작업을 해주면 되는데 경로는 위와 같습니다.
DMU KINEMATICS 모듈에서도 부품들의 움직임을 정의하기 위해 각 부품들을 상황에 맞게 구속을 줘야하는데요.
이런 구속 작업이 앞서 행해진 ASSEMBLY DESIGN 환경에서 위치를 구속해 주는 것과 거의 비슷하기에
'왜 똑같은 작업을 ASSEMBLY DESIGN와 DMU KINEMATICS 두 곳에서 하는거지?'
라는 궁금증이 생길 수도 있습니다.
그 이유는 바로 습관 들이기라고 보시면 될 것 같아요.
ASSEMBLY DESIGN 에서 구속을 해둔 채로 저장을 한 뒤 DMU KINEMATICS 환경에서 부품들을 요리조리 움직여보는게 좀 마음이 안심이 된다 할까요?
그럼 바로 DMU KINEMATICS 환경에서의 구속을 줘보도록 하겠습니다.
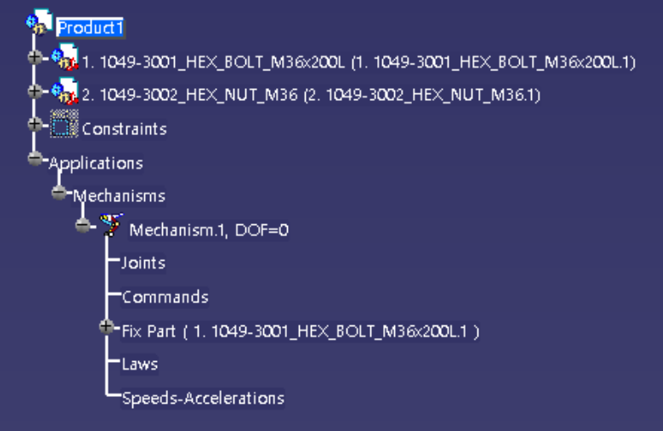
먼저 ASSEMBLY DESIGN에서 한 것과 같이 볼트를 FIX 시키기 위한 구속을 해야하는데요. DMU KINEMATICS에서는 필수로 알아야 하는 새로운 개념이 생깁니다.
그건 바로 Mechanism 개념 인데요. 쉽게 말하자면 어떠한 움직임을 부여하기 위해서는 한개의 메커니즘이 꼭 있어야 해요. 그래서 메커니즘을 우선적으로 만들어줘야 하는데
① FIX PART 선택
② Mechanism을 만들 수 있는 창이 자동으로 열림.
③ Mechanism 이름은 추후 수정이 가능하기에 우선 OK를 눌러 Mechanism을 생성해 줍니다.
그 후에 FIX 시킬 볼트를 클릭해주면 볼트의 고정 구속 메커니즘이 생성이 됩니다.
두 번째로 너트의 회전운동을 주려고 하는데요.
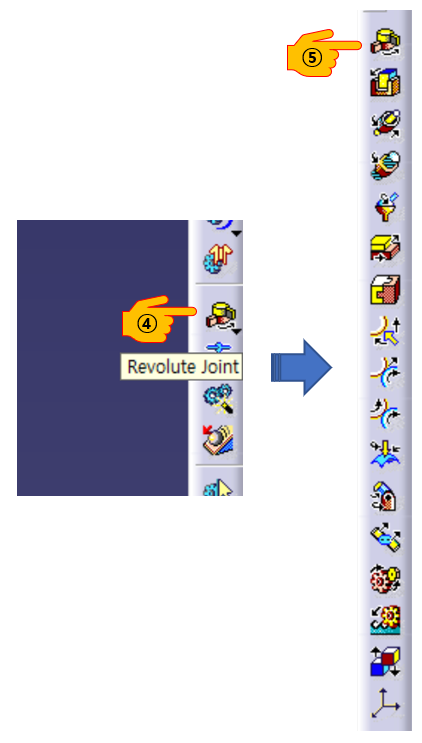
Revolute Joint 를 클릭하면 위 그림과 같이 하위 명령들이 주루룩 나오게 됩니다.
여기서 회전운동을 부여하도록 해주는 맨위 Revolute Joint를 다시 클릭하면
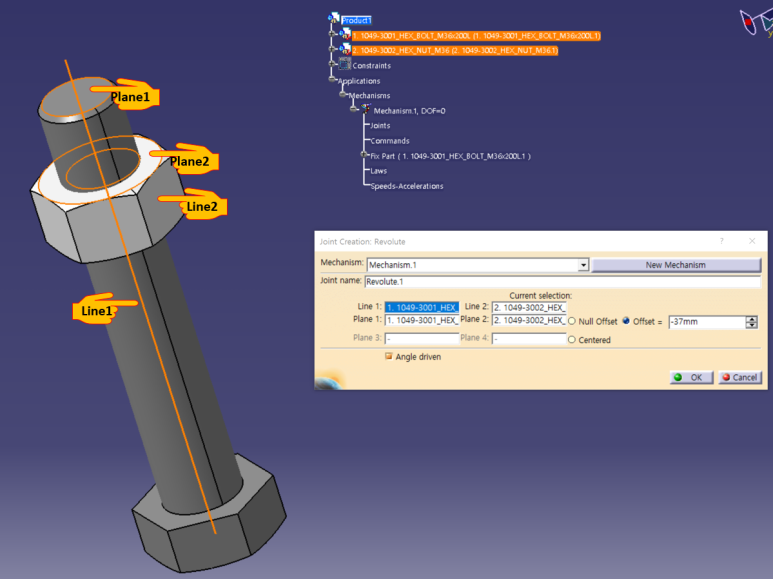
위와 같은 창이 뜹니다. 위쪽부터 보자면
▷ 처음에 만들어 둔 Mechanism.1에서 너트가 회전 운동 하도록 하는게 목표이므로 Mechanism.1을 먼저 선택하고
▷ Joint Name은 그냥 패스!
▷ Line 1과 Plane 1은 같은 부품에서 선택을 해야 하며 이는 각각 회전하는 축과 회전하는 축에 수직인 평면을 클릭하시면 됩니다. 위 그림에서 Line 1과 Plane 1은 볼트, Line 2와 Plane 2는 너트를 클릭하였는데요.
▷ Null Offset 옵션은 Plane 1하고 Plane 2를 갭 0으로 일치를 시켜버리니 Offset 옵션을 선택해서 기존에 설정했던 거리만큼 37mm 간격을 줍니다. (Offset 옵션을 선택하면 카티아가 자동으로 Plane 1에서 Plane 2까지의 거리를 입력해줍니다.)
▷ 마지막으로 Angle driven(동력) 체크박스를 선택해 주면 바로 시뮬레이션을 할 수 있게 됩니다. (선택 시 아래쪽에 움직이는 범위 설정을 할 수 있습니다.)
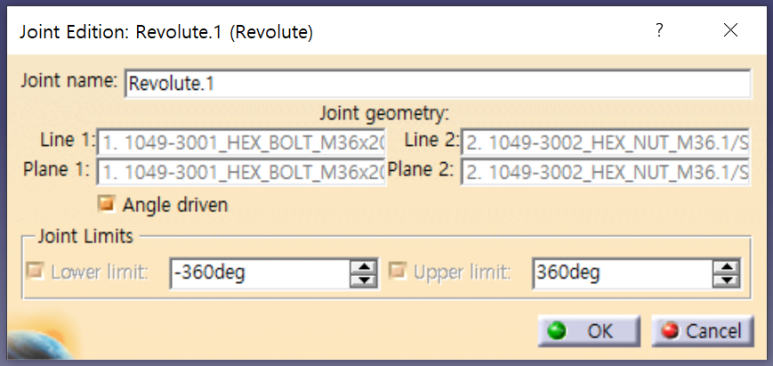
아래 그림처럼 Mechanism.1의 DOF(Degree of Freedom : 자유도)가 값이 0이 되어 있을 때 시뮬레이션이 가능하고 그림 오른쪽의 알림창은 시뮬레이션이 가능하다고 알려주는 알림창 입니다.
시뮬레이션 실행
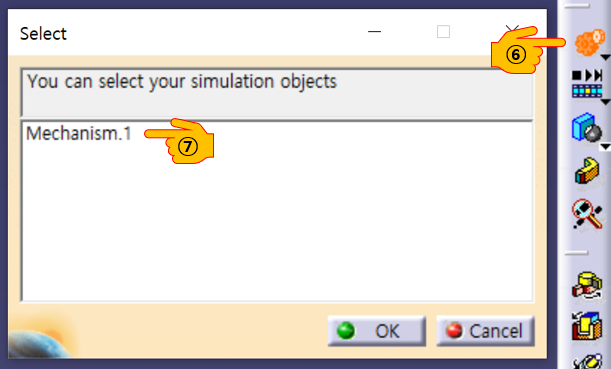
⑥ Simulation 선택
⑦ Mechanism.1 선택
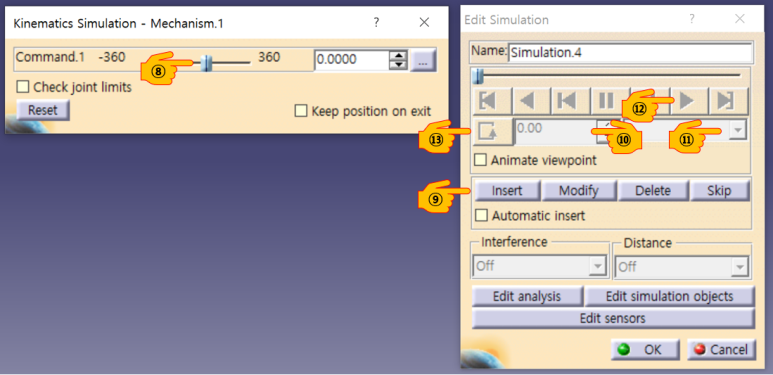
⑧ 번 바를 잡고 좌우로 이동하면 메인 화면에서 너트가 회전하는게 보이실 겁니다.
그 아래쪽 Reset을 클릭하면 바가 원래 자리로 가구요.
바를 이동시켜 움직일 범위를 정해준 뒤
⑨ insert를 클릭하면 설정해준 운동이
⑩ 안쪽으로 삽입되게 됩니다. 운동 하나는 0~1 단위로 취급이 되어서 처음 삽입한 운동은 1, 두 번째 삽입한 운동은 2, 그 다음은 3 과 같은 식으로 삽입되어 들어가며 운동들이 쌓이게 됩니다.
⑪ 로 속도조절을 하며
⑫ 로 재생을 시킬 수 있습니다.
⑬ 으로 한번 재생, 역재생, 계속재생 등의 선택이 가능합니다.
이게 글로 써서 설명이 잘 안되긴 하지만 나중에 저도 다시 볼 겸 정리를 해둔거라 이점 양해부탁드리구요. 읽기 힘드셨겠지만 읽어주셔서 너무나 감사드립니다!! 그럼 다음에 뵐게요!
마무리
혹시나 궁금하신 부분이 있으신 분은 댓글 남겨주시면 확인되는데로 답변드리겠습니다!
그리고 본문에 추가 또는 수정할 내용이 있다면 댓글로 알려주세요!
하단의 ♡(공감) 체크도 감사히 받겠습니다 (_ _)
'슬기로운 설계생활 > CATIA (3D)' 카테고리의 다른 글
| Link의 관계 및 종류 [Contextual link, CCP] (4) | 2024.08.06 |
|---|---|
| POWER COPY 설정 & 사용 방법 [지식기반 설계] (5) | 2024.06.17 |
| CATIA 투영 형상 3D 색상 반영하기 [카티아 도면 DRAWING] (59) | 2024.05.29 |
| CATALOG 생성/카달로그 만들기 [CATALOG DOCUMENT TIP] (5) | 2024.05.04 |
| Error) Syntax warning : units are not homogeneous [함수식 에러] (75) | 2024.05.03 |



