안녕하세요. 슬기로운 아봉생활에 방문해주신 구독자님!

오늘 아봉이가 들고온 주제는 "SPUR GEAR 시뮬레이션"입니다.
그럼 포스팅 진행해 보도록 하겠습니다!
평기어(SPUR GEAR) 모델링
먼저 기어 설계시에 중요한 점은 모듈(MODULE)과 톱니 갯수입니다. 모듈의 수치가 같아야지 두 톱니바퀴의 크기가 다르더라 하더라도 잘 맞물려서 작동이 되고 톱니 갯수에 따라 기어가 특정이 되기 때문인데요.
함수부터 셋팅을 해준 뒤 아래의 공식대로 진행을 해보겠습니다.
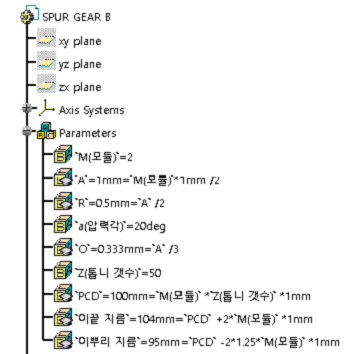
위 함수를 순서대로 보자면,
M : 모듈 값
A : 이끝의 길이
R : 코너의 필렛
a : 압력각(주로 20˚라고 해요.)
O : 옵셋 값
Z : 톱니의 갯수
PCD : 톱니의 중심 지름
이끝 지름 : 톱니 최 외곽 지름
이뿌리 지름 : 톱니 내측 지름

이를 바탕으로 톱니는 한개만 모델링을 해주고 원형 패턴을 사용해서 톱니 갯수만큼을 회전 복사해줍니다.
 |
 |
 |
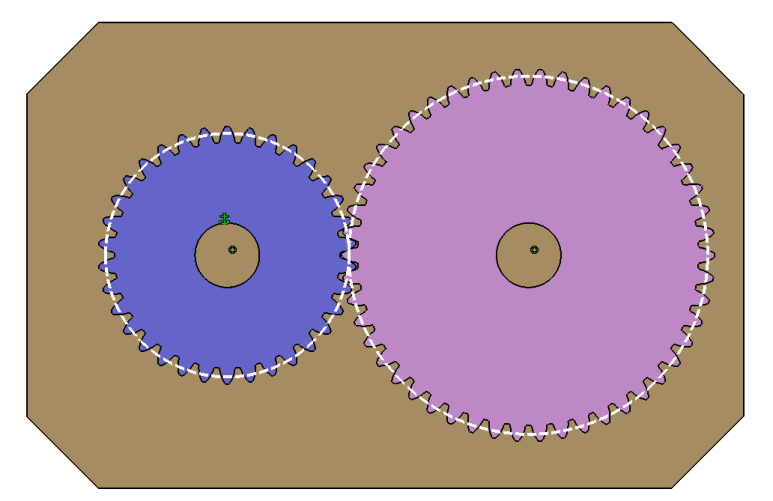
요렇게 만들어 저장을 한 후에 톱니의 갯수(Z) 값만 수정하여 다른 크기의 기어도 만들어 니다.
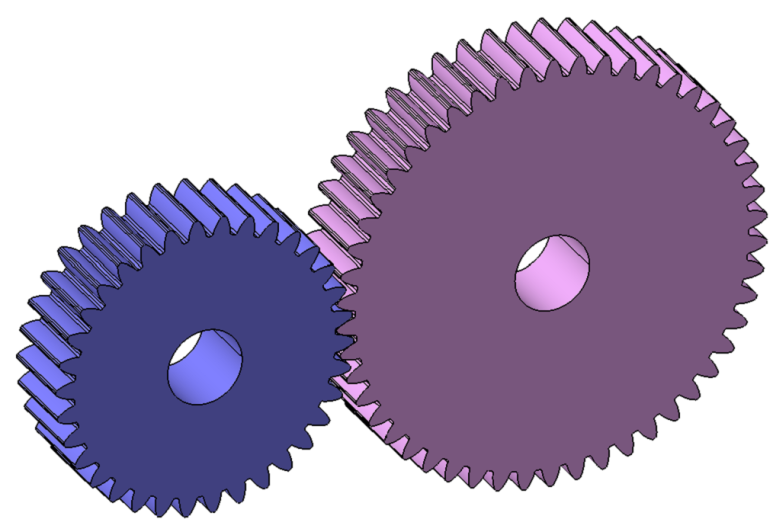
왼쪽 기어 톱니의 갯수는 34개, 오른쪽 기어 톱니의 갯수는 50개에요.
마지막으로 이 둘을 고정하여 회전 시킬 수 있는 브라켓 모델링을 추가해주면 끝!

ASS'Y-조립
위에 만들어 놓은 GEAR A(작은 톱니), GEAR B(큰 톱니), BRKT(브라켓)를 전부 ASS'Y(조립)을 할건데요. 대부분
Coincidence Constraint로 구속 작업이 되긴 하지만 톱니하고 톱니하고의 접촉부에는
Contact Constraint로 구속이 되어야 합니다. 여기서 놓면 안되는 점이
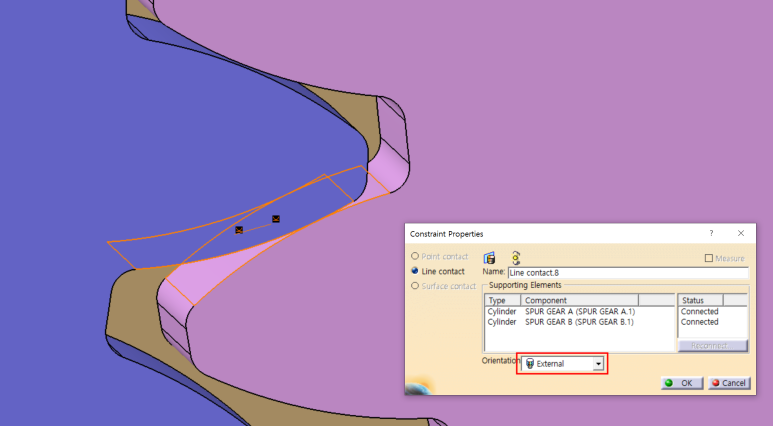
접촉 방식인데요. 외접 방식(EXTERNAL)으로 접촉방식이 선택되어야 합니다.
이렇게 ASS'Y(조립)를 하게되면 시뮬레이션을 하기 위해 DMU KINEMATICS 로 들어가 줍니다.
DMU-시뮬레이션
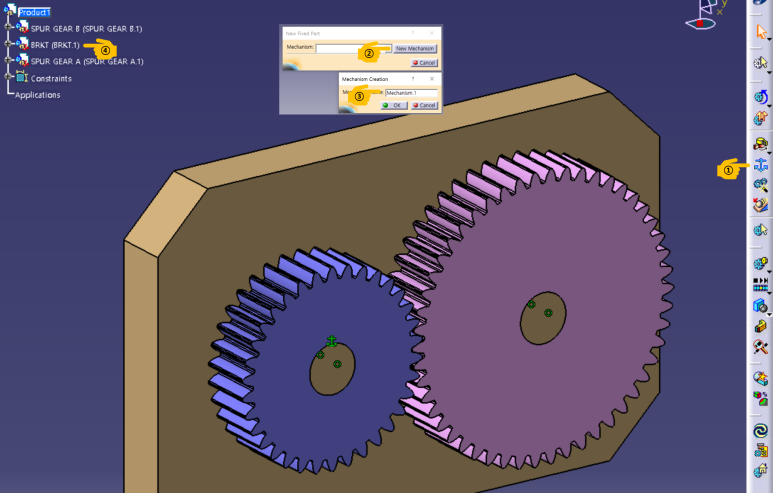
첫번째로 브라켓을 고정하는 것으로
① FIXED PART 선택
② 새 매커니즘을 설정
③ 이름은 변경없이 바로 OK
④ 그리고나서 고정시킬 모델링인 브라켓을 선택
그리고 다음 운동 부여인 GEAR JOINT를 하려면

를 두 기어 모두에 설정을 해주어야 하는데요.
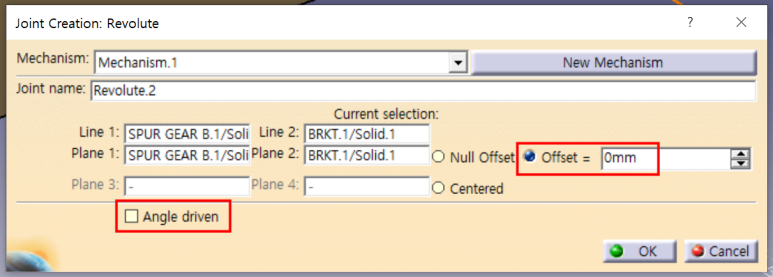
옵셋 설정은 0으로 꼭 해줘야 하고, 회전 동력은 추후 주겠습니다.(체크X)
이렇게 두 기어 모두에 회전 구속을 주셨다면 GEAR JOINT를 시작할 수 있는데요.

그전에 해둬야 할 작업이 있습니다.
기어를 모델링하며 사용했던 PCD라인이 필요하기에 모두 꺼내줍니다.
그리고 나서 GEAR JOINT를 실행시키
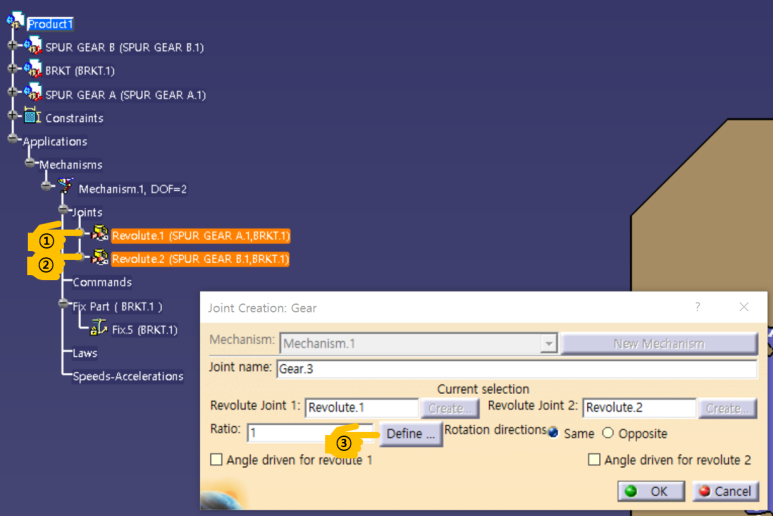
이런식으로 Revolute Joint를 선택하도록 나옵니다. 각각 기어의 Revolute Joint를 선택해주고(①, ②)
③ RATIO는 자동 정의가 되도록 Define 버튼을 클릭해줍니다.
그리고 나서 아래와 같은 창이 나오면
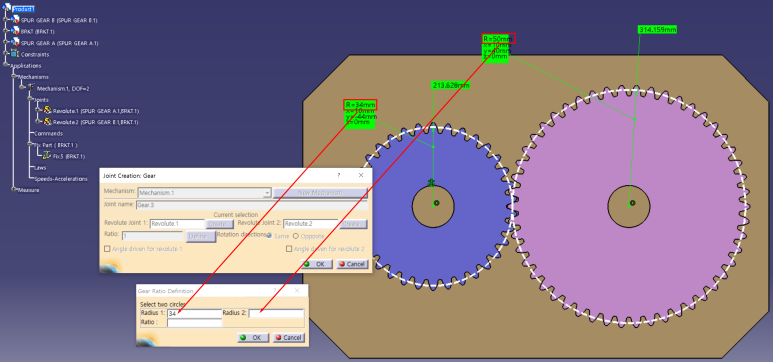
미리 꺼내둔 각각 톱니의 PCD 를 선택해주시면 자동으로 반지름 값이 입력이 됩니다. 그리고는 자동으로 RATIO 값도 생성이 되요. 거기에 아래의 사진과 같이 서로 반대방향으로 돌도록 하기 위해 OPPOSITE를 체크하고 동력까지 체크를 해주면
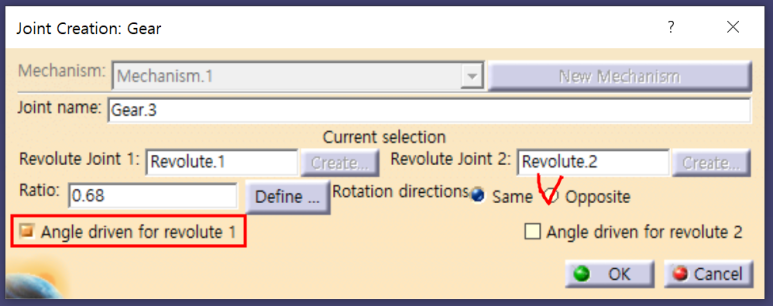
시뮬레이션 가능 알람이 뜹니다.
DMU-시뮬레이션 속도 조절
혹시나 시뮬레이션 속도가 높아서 재생이 제대로 안될 경우에는
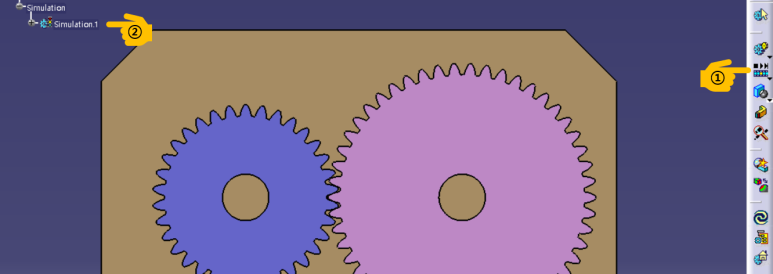

① SIMULATION PLAYER 클릭
② 미리 만들어둔 시뮬레이션을 선택
③ 계속 반복 모드 선택
④ PARAMETERS를 선택
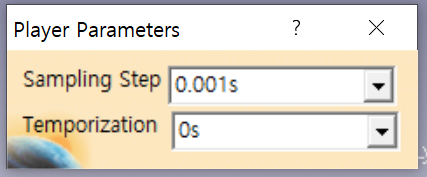
0.001S 속도로 바꾼 뒤 재생을 해보면 속도 변경이 되는 것을 알 수 있습니다.
그럼 이만 DMU 환경에서 스퍼기어 움직이는 방법에 대한 포스팅을 마치도록 하겠습니다. 감사합니다!
마무리
혹시나 궁금하신 부분이 있으신 분은 댓글 남겨주시면 확인되는데로 답변드리겠습니다!
그리고 본문에 추가 또는 수정할 내용이 있다면 댓글로 알려주세요!
하단의 ♡(공감) 체크도 감사히 받겠습니다 (_ _)
'슬기로운 설계생활 > CATIA (3D)' 카테고리의 다른 글
| 구부러진 형상 모델링 [BENDING DESIGN] (3) | 2024.10.05 |
|---|---|
| 카티아(CATIA) 그 외 시뮬레이션 기능들 [DMU KINEMATICS] (2) | 2024.08.14 |
| Link의 관계 및 종류 [Contextual link, CCP] (4) | 2024.08.06 |
| POWER COPY 설정 & 사용 방법 [지식기반 설계] (5) | 2024.06.17 |
| 카티아 디지털 목-업 맛보기 [CATIA DMU KINEMATICS] (2) | 2024.06.12 |



